аэОУУЛаДВЉПЭСЫЃЌзюНќдкбаОПWPFЯТЦјХнЕФЛЗЈЃЌбаЗЂЙ§ГЬЛЙЪЧБШНЯМшаСЕФЃЈжївЊЪЧИДЯАСЫИпжаЕФЪ§бЇжЊЪЖЃЌMMPШЋЭќЙтСЫЃЉЃЌетЦЊВЉПЭжївЊЪЧЬсЙЉвЛИіЫМТЗИјДѓМвВЮПМЃЌШчЙћгаДѓЩёЛЙгаИќКУЕФНтОіЗНАИПЩвдВЛСпФњЕФбдТлОЁЧщСєбдЁЃФУИіетИіРраЭЕФЙІФмЯюФПЃЌЪзЯШЗжЮіПЩвдМйЩшЦјХнЪЧгЩЃКЭждВ/ОиаЮ/дВ(ЭждВЕФЬиР§)КЭШ§НЧаЮзщГЩЃЌOKЪзЯШЗжВНжшНщЩмбаЗЂВНжшЃК
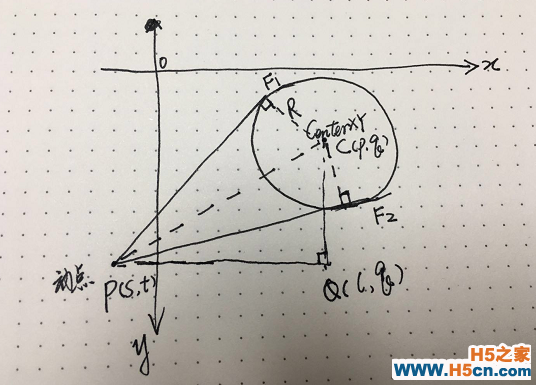
ЕквЛЃКЪзЯШЮвЕФЫљгаЕФЭМаЮЖМЪЧЛљгкОиеѓЛГіРДЕФЃЌзјБъжсЦ№ЕуЪЧ(0,0),МйЩшвЛИіЭЯРЕуDynamicPoint (x,y),КЭвЛИіЙЬЖЈЕуFixedPoint (m,n);гЩСНЕуМДПЩШЗЖЈвЛИіОиаЮДѓаЁЃЌДгРяУцЛГіФкНгЭМаЮКЭвЛИіШ§НЧаЮЃЛ
1ЁЂаТНЈОиаЮ var TriagleRect = new Rect(FixedPoint, DynamicPoint);
2ЁЂМйЩшОиаЮжЎФкДцдквЛИіЕШБШР§ДѓаЁЕФдВЃЌЖјдВЪЧгЩдВаФКЭАыОЖзщГЩЕФжБЯпЫљЛЎЙ§ЕФЛЁШЗЖЈЕФЃЌАыОЖRЃЌдВаФCenterXY (p,q);ЯрЕБгквбжЊ
3ЁЂПЩвдвЦЖЏЕФЕуPЩшЮЊЃКCurrentFixedPoint(s,t); етИіЕуЪЧгЩЪѓБъВЖЛёЕФЯрЕБгквбжЊ;
4ЁЂгЩЖЏЕуCurrentFixedPoint(s,t)ЯђдВ MЃЈдВаФЮЊCenterXY (p,q),АыОЖRЃЉзїСНЬѕдВЕФЧаЯпЃЌЧѓГіСНЧаЕуF1(f1x,f1y)ЁЂF2(f2x,f2y)зјБъжЕ?
ШчЯТЭМ(зіЕФЭМБШНЯФбПДЃЌзіИЈжњжЎгУ)
ЕНетБпПЯЖЈКмЖрШЫОѕЕУКмЪьЯЄЃЌУЛДэетЪЧИпжаЕФЪ§бЇЬтЃЌетБпдкбаОПЕФЙ§ГЬжабаОПСЫСНжжНтОіЗНАИЃЌЯТУцМђЕЅЕФНщЩмЯТЃК
ЗНАИ1ЃКШчЭМЃЌгЩдВаФЕуCЯђСНЧаЕузіДЙжБЯпЃЌШЛКѓИљОнШ§НЧКЏЪ§зіИЈжњЯпPQЃЌQCЕУГіаББпPCГЄЃЌгЩЭМжаПЩвджЊЕР
double Sine = R / AB; //ЧѓГіе§ЯвжЕ
ЁЯF1PC= Math.Round((Math.Asin(Sine) / Math.PI) * 180, 2);//Абе§ЯвжЕЛЛЫуГЩНЧЖШ
РћгУЯђСПКЭЯђСПФЃНјааМЦЫуЖўдЊвЛДЮЗНГЬПЩвдЕУГіF1,F2зјБъ.
ЗНГЬ1ЃКPF1ЯђСП=PCЯђСП+CF1ЯђСП ЃЌетРяПЩвдЕУГівЛИіЙигкF1ЕФЖўдЊвЛДЮЗНГЬЃЛ
ЗНГЬ2ЃКPF1ЯђСПЕФФЃ=ЃЈPCЦНЗН+CF1ЦНЗНЃЉПЊИљКХ,етРяПЩвдЕУГівЛИіЙигкF1ЕФЖўдЊЖўДЮЗНГЬЃЛ
гЩетСНИіЗНГЬЪНПЩвдНтГіF1ЕФзјБъжЕЃЌЭЌРэвВПЩвдЕУГіF2ЕФзјБъжЕ;
ЗНАИ2ЃКвВЪЧШчЭМЃЌЗНАИ1ЪЧЩдЮЂИДдгСЫвЛЕуЃЌБШНЯВЛРћгкШэМўЕБжаЕФгІгУЃЌетБпзХжиНщЩмЕкЖўжжЫуГіЧаЕуЕФПЩааадЗНАИЃЛ
double MB = Math.Sqrt(Math.Pow(PC, 2) - Math.Pow(R, 2));//MBЮЊЧаЯпЕФГЄЖШ
double Sine = R / AB; //ЧѓГіе§ЯвжЕ
ЁЯF1PC= Math.Round((Math.Asin(Sine) / Math.PI) * 180, 2);//Абе§ЯвжЕЛЛЫуГЩНЧЖШ
НгЯТРДИњЗНАИ1ВЛЭЌЕФЕиЗНЪЧЃКЮввЊШУдВаФЕуАДееНЧЖШЁЯF1PCНјааЫГФцЪБеыНјааа§зЊ
Vector vector = Point.Subtract(CenterXY, CurrentFixedPoint); 3 Matrix matrix = new Matrix(); 4 matrix.RotateAt(SineAngle, CurrentFixedPoint.X, CurrentFixedPoint.Y); v = matrix.Transform(vector); 7 v.Normalize(); 8 9 Matrix matrix2 = new Matrix(); 10 matrix2.ScaleAt(_vector, _vector, CurrentFixedPoint.X, CurrentFixedPoint.Y); 11 var v2 = matrix2.Transform(v); 12 return v2;
ОЙ§ЩЯУца§зЊЃЌШЛКѓЫѕЗХЕНЕЅЮЛ1ЕФЯђСПМйЩшЮЊPF1' ,ШЛКѓАДБШР§ЗХДѓЕНPF1ЕФФЃГЄжЎКѓЕУГіЯђСПPF1ЃЌетбљОЭПЩвдЕУГіF1ЕузјБъЃЌЭЌРэЕУГіF2ЃЛОпЬхзЊЛЛШчЯТЃК
tmpPoint = Point.Add(P, SecondPoint); 3 var tmpPoint2 = Point.Add(P, ThirdPoint);
етбљОЭЪЕЯжСЫвЦЖЏЖЏЕуPЃЌF1,F2вВЛсИњзХНЧЖШНјааЪЕЪББфЛЏЃЌЕЋЪЧМаНЧВЛБфЃЌOKЃЌЯждкЖЏЬЌЕФСНИіЕуЖМвбОШЗШЯГіРДСЫЃЌНгЯТРДОЭПЩвдЭЈЙ§C#ЬсЙЉЕФЗНЗЈНјааСЌЯпЃЌетбљОЭзщГЩСЫвЛИіШ§НЧаЮЃЌетИіШ§НЧаЮЪЧгЩФкдВаФГіЗЂбгЩьжСЖЏЕуPЕФЭМаЮЁЃ
PathFigure PointPathFigure = new PathFigure(); 3 PointPathFigure.StartPoint = CurrentFixedPoint; 4 PointPathFigure.Segments.Add(new LineSegment(new Point(tmpPoint.X, tmpPoint.Y), true)); 5 PointPathFigure.Segments.Add(new LineSegment(new Point(tmpPoint2.X, tmpPoint2.Y), true)); 6 7 PathGeometry myPathGeometry = new PathGeometry(); 8 myPathGeometry.Figures.Add(PointPathFigure);
ЁЁ
 ЯрЙиЮФеТ
ЯрЙиЮФеТ

 ОЋВЪЕМЖС
ОЋВЪЕМЖС ШШУХзЪбЖ
ШШУХзЪбЖ ЙизЂЮвУЧ
ЙизЂЮвУЧ
